Infrastructure LiDAR Sensing
Why Infrastructure LiDAR?
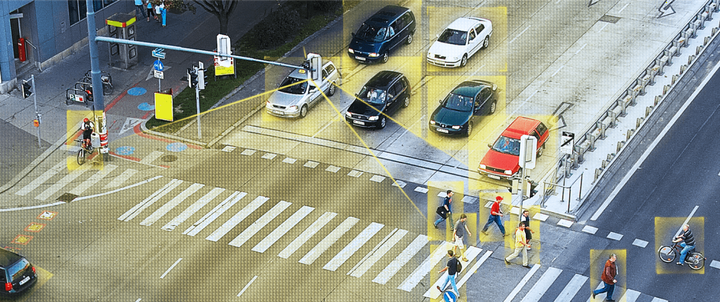
Future Cities will have LiDAR in the road intersections or on the side of a road. Infrastructure LiDAR can augment autonomous driving and can provide lot more fine grain surveillance.
Our Objectives
We are working on deveoping novel point cloud registration algorithms for infrastructure LiDARs (with different locations and orientations) as well as algorithms for fine-grain vehicle tracking using a stitched point cloud to augment autonomous driving.
Point Cloud Registration (Combining multiple LiDAR data):
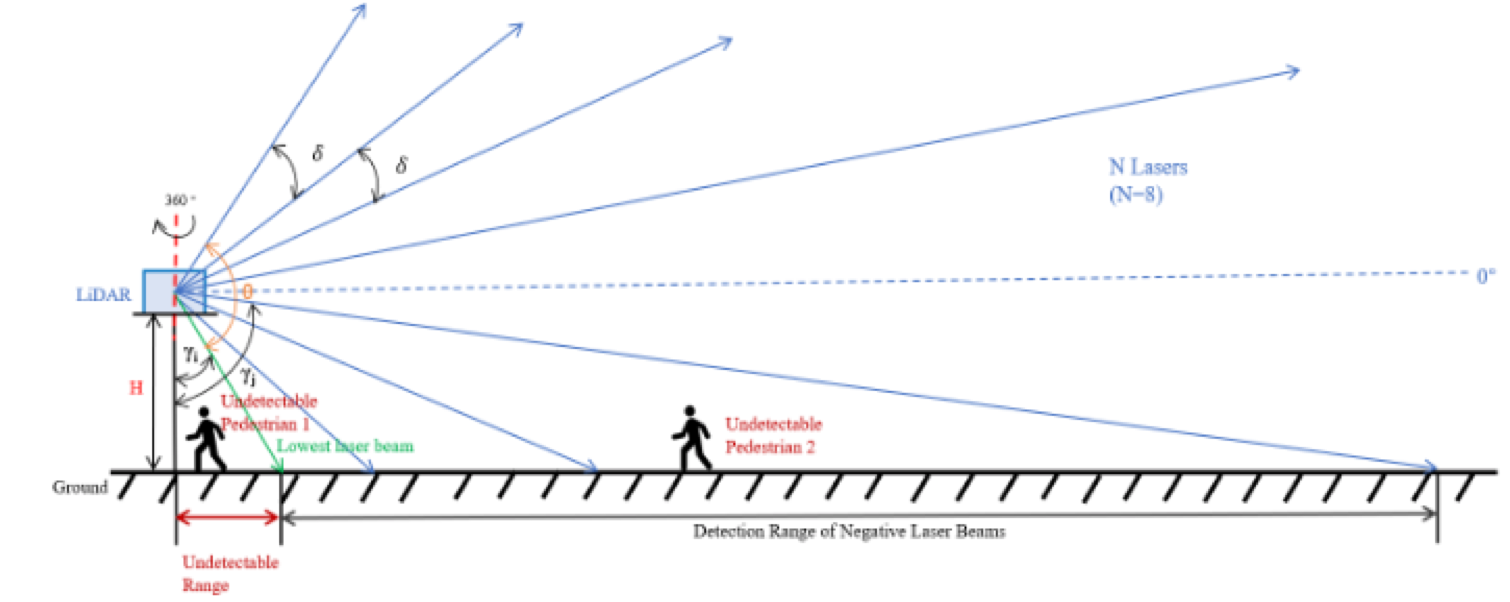
- A single LiDAR can not provide complete information due to line-of-sight blocking, range, and FoV
- A single LIDAR data can be very sparse and can miss objects.
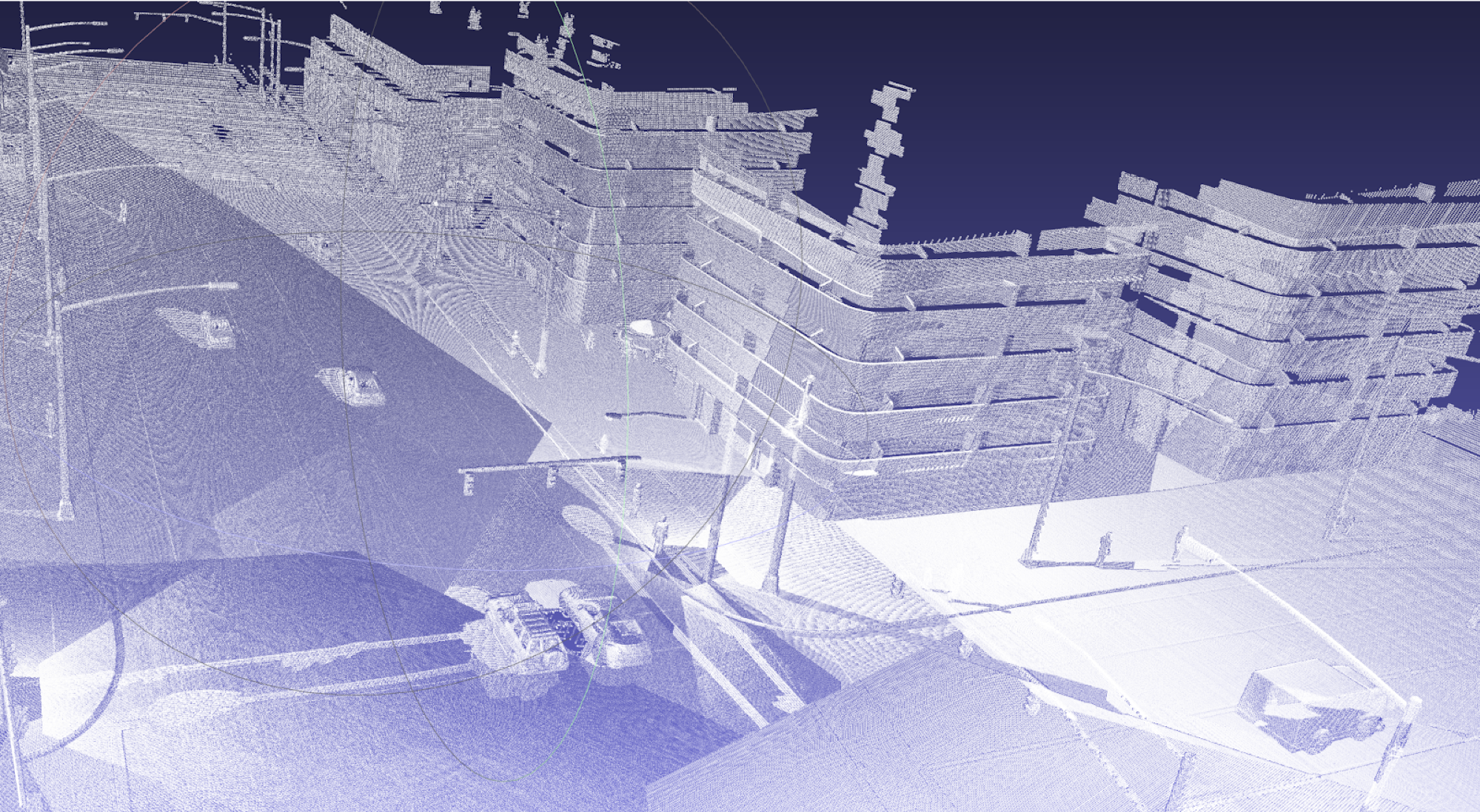
- Multiple spatially distributed LiDAR data, once combined, will have more complete information.
We are working on deveoping novel point cloud registration algorithms for infrastructure LiDARs (with different locations and orientations).
Detecting and Tracking Object
LiDAR only generate a point cloud for objects without any info on
- Whether the two points belong to the same objects?
- What type of object is it?
- What are some unique identifiers?
We are working on fine-grain localization and tracking of vehicles using a stitched point cloud to augment autonomous driving; we leverage couple of common facts:
- LiDAR can distinguish between static and dynamic objects.
- For two consecutive frames:
- Points related to static objects will remain mostly unchanged
- Points related to dynamic objects will move.
Pradipta Ghosh
Post-Doctoral Research Scholar
My research interests include Internet of Things, Ubiquitious Computing, Automation & Robotics, Networked Systems, and Compute Vision.