 My caption 😄
My caption 😄
My caption 😄
My caption 😄
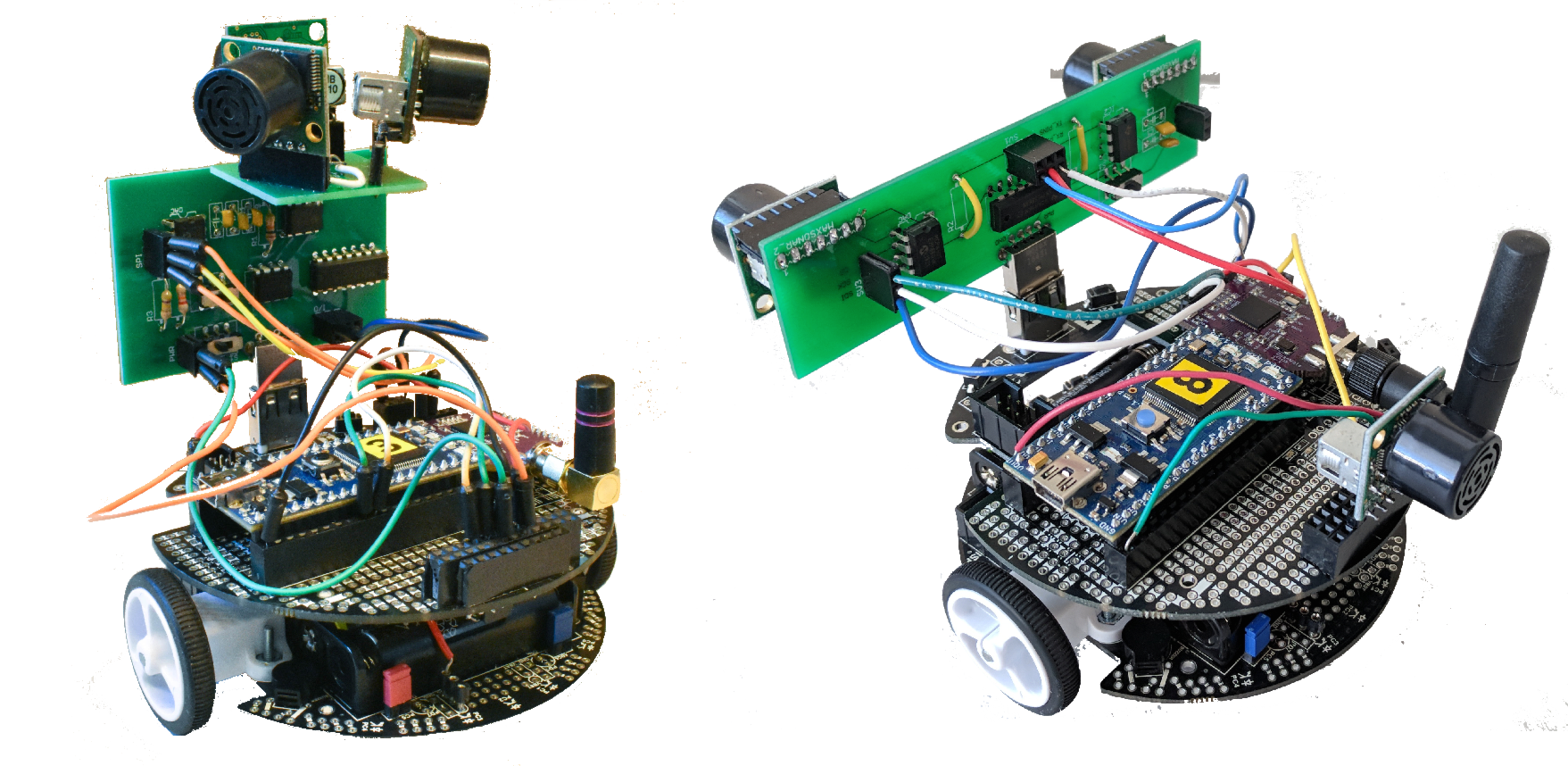
We present the Intelligent Robotic IoT System (IRIS), a modular, portable, scalable, and open-source testbed for robotic wireless network research. There are two key features that separate IRIS from most of the state-of-the-art multi-robot testbeds. (1) Portability: IRIS does not require a costly static global positioning system such as a VICON system nor time-intensive vision-based SLAM for its operation. Designed with an inexpensive Time Difference of Arrival (TDoA) localization system with centimeter level accuracy, the IRIS testbed can be deployed in an arbitrary uncontrolled environment in a matter of minutes. (2) Programmable Wireless Communication Stack: IRIS comes with a modular programmable low-power IEEE 802.15.4 radio and IPv6 network stack on each node. For the ease of administrative control and communication, we also developed a lightweight publish-subscribe overlay protocol called ROMANO that is used for bootstrapping the robots (also referred to as the IRISbots), collecting statistics, and direct control of individual robots, if needed. We detail the modular architecture of the IRIS testbed design along with the system implementation details and localization performance statistics.